Как работает клешня «хватайки»
Как конкретно работает клешня, в профессиональном аппарате, я не разглядел, поскольку механика была прикрыта защитным кожухом, поэтому пришлось поэкспериментировать.
Поломав некоторое время голову, получилось придумать более-менее рабочий вариант: клешня состоит из четырех «пальцев», которые одним концом фиксируются на неподвижной раме. Так же добавил крестовину, с ней «пальцы» имеют шарнирное соединение примерно посередине. К неподвижной части рамы жестко зафиксировал сервопривод, качалка которого опускает и поднимает ось. Крестовина в свою очередь жестко закреплена к оси и вместе с ней совершает движения вверх и вниз, из-за чего и происходит сжатие и раскрытие клешни. Чтобы было понятнее, ниже находится картинка с клешней. Изображение можно вращать с помощью мышки, зажав ЛКМ и перемещая влево или вправо.
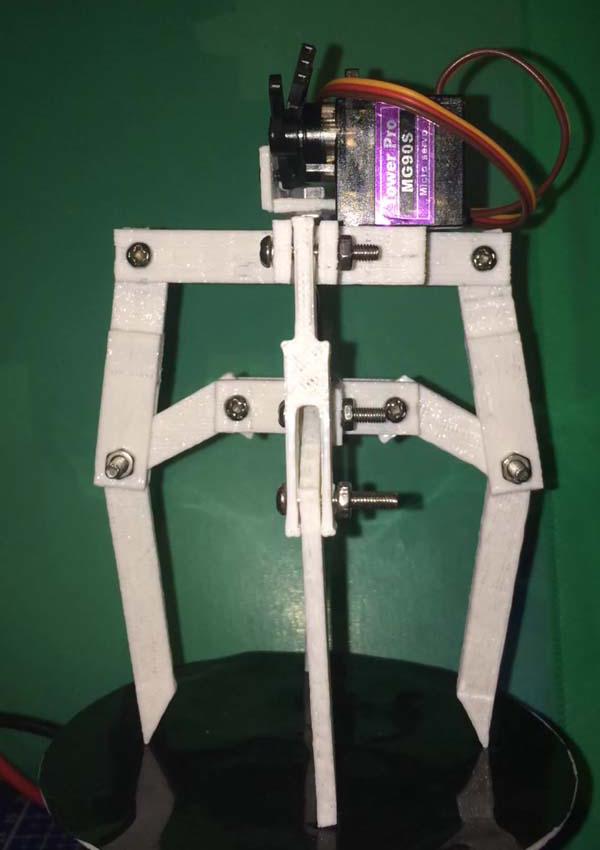
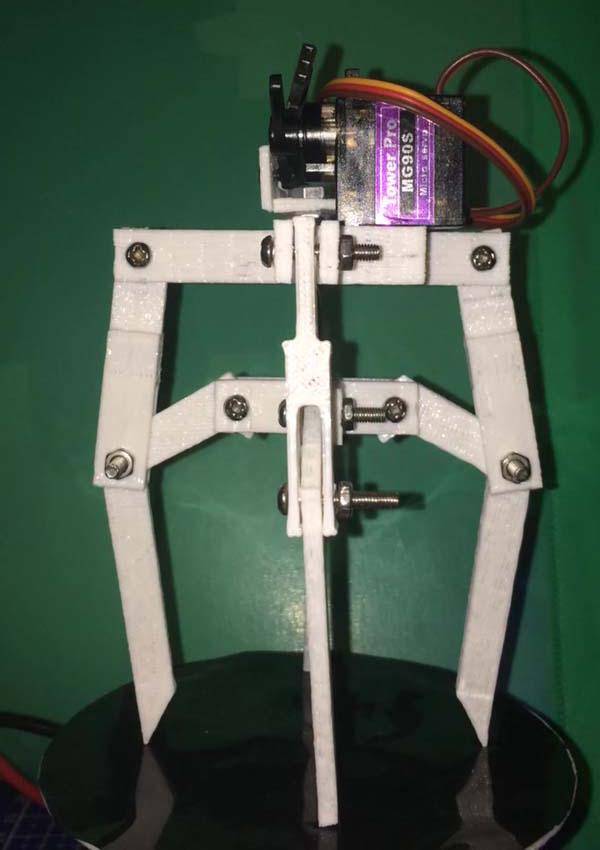










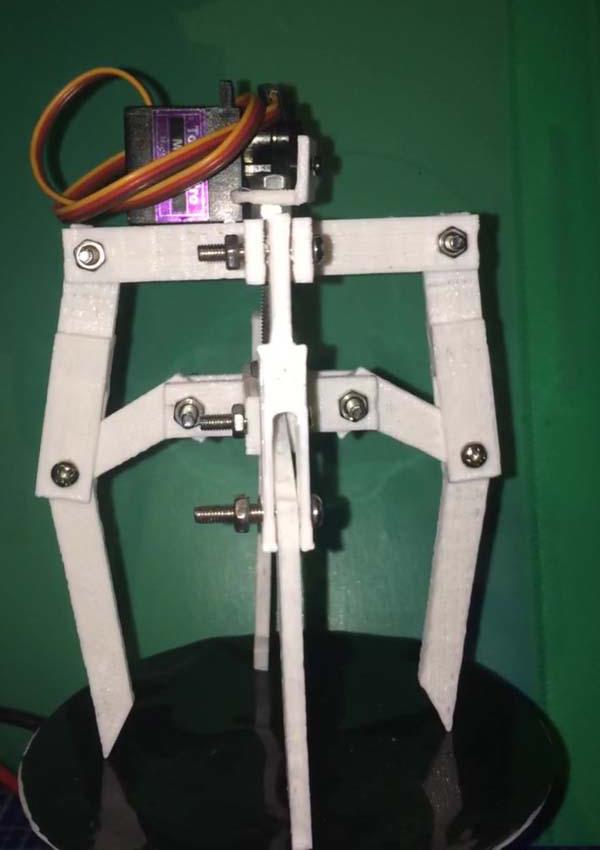








С изготовлением клешни особо не мучался и напечатал ее на 3D принтере.
4.7. Устойчивость усилителей с обратной связью
Усилители с ООС при определённых условиях могут самовозбуждаться, т.е. генерировать электрические колебания. Это свидетельствует о том, что усилитель прекращает свои функции по усилению электрических колебаний. При этом ООС превращается в ПОС. это происходит обычно за пределами рабочего диапазона частот из-за фазовых сдвигов в усилителе и в цепи обратной связи. Фаза как аргумент вектора петлевого коэффициента передачи Т изменяется:
Т = – β·К·е j∆φβК;
где величина ∆φβК определяется как сумма фазовых сдвигов в усилителе и в четырёхполюснике обратной связи:
∆φβК = ∆φК + ∆φβ ; (4.13)
Уравнение (4.13) определяет дополнительный фазовый сдвиг к 180º между векторными источниками сигнала UВХ.ИСТ и UВХ.СВ., т.е. (180º + ∆φβК). Причиной изменения фазы являются реактивные элементы схемы, а на высоких частотах дополнительно инерционность работы усилительных элементов.
При ООС и ПОС величина Т является действительной:
FООС = 1 + ТООС > 1;
FПОС = 1 – ТПОС < 1;
Пока ТПОС < 1, усилитель не возбуждается, хотя ООС превращается в ПОС, т.е. она оказывается ещё недостаточно глубокой для самовозбуждения. Генерация наступает при:
ТПОС = 1;
и коэффициент усиления с обратной связью будет иметь бесконечно большое значение:
Практически усилитель возбуждается на низких и высоких частотах при:
ТПОС ≥ 1 и φβК= 180º + ∆φβК
Для оценки устойчивости усилителя с обратной связью используются различные критерии. Наиболее приемлемым оказался критерий Найквиста, который заключается в следующем: “Если точка с координатами (–1;0) лежит внутри годографа вектора β К для диапазона частот от 0 до ∞, то система неустойчива, рис. 4.7а; если же точка (–1;0) лежит вне указанного годографа, система устойчива, рис. 4.7б”
Рис. 4.7. Диаграммы Найквиста для неустойчивого а) и устойчивого усилителей б) с обратной связью.
Для повышения устойчивости усилителей разработаны методы, суть которых сводится к следующему.
- В усилителе с обратной связью следует охватить как можно меньше число каскадов, т.к. это уменьшает сдвиг фаз петли обратной связи
- Применять в охваченных обратной связью каскадах схемы межкаскадовой связи, дающие малые фазовые сдвиги.
- При проектировании усилителей задаются допустимой степенью приближения годографа Т к критической точке; эта степень получала название запаса устойчивости усилителя. Различают запас устойчивости по модулю “X”
X = – 20lg |TX| при arg TX = π; и запас устойчивости по фазе “Y”;
πY = π – arg T при |TX| = 1
Для групповых усилителей, имеющих глубокую ООС принимают запасы устойчивости: по модулю 3n дБ, а по фазе 0,175 рад (10n град.), где n – число усилительных каскадов.
How to connect a servo motor to the Arduino?
Wiring a servo motor is very easy because you only need to connect three wires: power, ground, and signal. The power wire is typically red and needs to be connected to 5 V.
A micro servo like the SG90 consumes around 10 mA when it’s idle and 100 – 250 mA when rotating, so you can power it directly with the 5 V output of the Arduino. However, you need to be careful when using multiple or larger servo motors. If your motor(s) consume more than 300 mA you should use an external power supply to avoid damaging the Arduino! See the schematic below for using external power supplies.
The ground wire is typically black or brown and should be connected to the ground pin of the Arduino. When using a separate power supply, connect the ground wire to both the Arduino and the power supply ground.
The signal wire is typically yellow, orange, or white can be connected to any of the digital pins of the Arduino. In this case, I connected it to digital pin 9.

Servo motor with Arduino Uno wiring diagram.
The connections are also given in the table below.
Servo motor connections
| Servo motor | Arduino |
|---|---|
| Power (red) | 5 V |
| Ground (black or brown) | GND |
| Signal (yellow, orange or white) | Pin 9 |
As I mentioned before, if you are using large or multiple servo motors you should use an external power supply. Simply connect the power supply as shown in the wiring diagram below. Make sure to connect the GND pin of the Arduino and the power supply together.
You can also use this setup if your servo motor requires a different voltage than the Arduino can provide e.g. 6 V or higher. The following picture shows how to use an external power supply to drive the servo:

Connections for servo motor with external power supply
| Servo motor | Connection |
|---|---|
| Power (red) | 5 V power supply |
| Ground (black or brown) | Power supply ground and Arduino GND |
| Signal (yellow, orange or white) | Pin 9 Arduino |
Перейдём к практике
В наборе, который мы с вами распаковывали ранее мне достался сервопривод Tower Pro SG90 — это одна из популярнейших моделей для хобби, поэтому китайцы кладут их во все подобные наборы. Отдельно он стоит 3-4 доллара.
При всей своей миниатюрности, SG90 достаточно «сильный» и момент на валу аж 1.8 кг/см.



В комплекте с ним есть набор креплений для соединения с механизмами: четырёхсторонний (в виде +), двухсторонний (в виде —) один односторонний, что вы можете наблюдать на фото выше. Кроме них в комплект всегда кладут крепежные винтики. На валу есть шлицы для крепления оснастки, чтобы она не проворачивалась.
Сегодня нам понадобится:
Сервопривод SG90 — 1 штука; Плата Arduino, любая, у меня есть UNO — 1 штука; Перемычки или провода для содинения — 5-10 штук; Потенциометр, например, на 10К (на самом деле его сопротивление не слишком важно) — 1 штука. Если вы будете питать серву напрямую от платы, то подключайте её к пинам 5V красным проводом, GND – коричневым (черным) проводом, а жёлтый провод — это сигнал, его можно к любому пину, хоть цифровому, хоть аналоговому, хоть с ШИМ, хоть без него
Если вы будете питать серву напрямую от платы, то подключайте её к пинам 5V красным проводом, GND – коричневым (черным) проводом, а жёлтый провод — это сигнал, его можно к любому пину, хоть цифровому, хоть аналоговому, хоть с ШИМ, хоть без него.
Я же заблаговременно собрал схему на макетной плате и подключил к ней потенциометр, которым мы далее будем задавать положение вала. Средний вывод потенциометра я подключил к аналоговому пину A0 ардуино, а сигнальный провод сервопривода – к 9 пину. Схему приведу ниже.
Проверяем работоспособность сервопривода, для этого заходим в Arduino IDE, открываем пример из стандартного набора под названием «Servo→Sweep»
По умолчанию в этом примере выставлено, что сигнальный провод подключается к 9-му пину, если вы подключили к другому – исправьте вот это значение в коде:
Код несложный, привожу его ниже с русскими комментариями.
// Можно создать до 12 таких объектов и подключить столько же приводов
//для объекта myservo подключен к 9 пину
// чтобы привод повернулся на угол, указанный в pos
В результате сервопривод вращается от одного крайнего положения до другого. Скорость перемещения можно изменять либо путем изменения задержки между шагами (delay), либо путем изменения шага, а именно правкой последнего значения в аргументах цикла — for (pos = 180; pos >= 0; pos -= 1). На видео я показал примеры с разными значениями задержки.
Дальше мы откроем другой из стандартных примеров — knob. Здесь-то нам и понадобится потенциометр. Ниже приведена схема подключения для этого примера.
Разберем код. Первая его часть, где подключается библиотека и назначается пин, к которому подключен управляющий провод сервопривода не изменилась, и её я комментировать не буду.
// к которому подключено потенциометр (пин А0)
// подробнее мы рассматривали этот вопрос в этой статье —
// до необходимых нам градусов — от 0 до 180
// значениями, полученными с аналогового входа
Библиотека Servo.h по умолчанию встроена в Arduino IDE, разберем основные её команды:
Servo myservo – вместо «myservo» может быть любое слово, это название вашего сервопривода.
attach() — привязать переменную, объявленную предыдущей командой к пину. Пример использования ИмяПривода.attach(9) – расшифровывается так: “сервопривод с названием «ИмяПривода» подключен к пину 9”.
Если у вашего привода длины управляющих импульсов отличаются от стандартных 544 и 2400 мкс, то их можно задать через запятую после номера пина, вот так servo.attach(pin, min, max), где servo – имя привода (имя переменной типа Servo), min – длина сигнала для минимального угла поворота (0°) в микросекундах, max – ширина импульса управляющего сигнала для максимального угла поворота (180°) в микросекундах.
write() — передаём приводу угол поворота в градусах (пример: ИмяПривода.write(180))
writeMicroseconds() — тоже самое, только указывает на длину сигнала в микросекундах.
read() — определяет текущее положение вала;
attached() — Проверяет подключена ли переменная типа Servo к пину с сервоприводом. Синтаксис — Servo.attached().
detach() — отмена команды attach, то есть отсоединяет определенный переменной типа Servo сервопривод от выхода.
Процесс рекуперации
Зачастую запускается при переключении режимов работы сервомотора: что это такое? Это возвратная энергия, которая выделяется при смене знака (направления движения) относительно вращающего момента. Обычно она не слишком большая, но все равно собирается на конденсаторах, увеличивая, таким образом, напряжение на звене постоянного тока.
В тех же случаях, когда данное неравенство абсолютных значений достигнет серьезной отметки, пороговый уровень емкости шины будет пробит. И тогда все излишки будут сброшены в тормозной резистор.
Мы постарались рассмотреть все особенности данных механизмов и подчеркнуть удобство и перспективность их использования. Предлагаем также взглянуть на схемы сервоприводов, фото и видеоролики на эту тему – чтобы вы могли дополнить свое представление.
Источник
Arduino Mega2560
Arduino Mega2560:
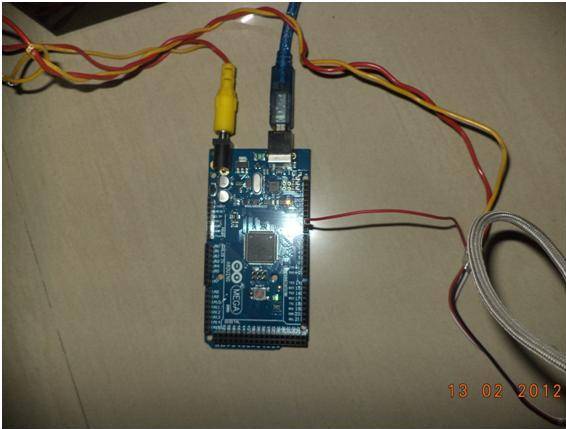
Fig. 4: Typical Image of Arduino Mega 2560
The Arduino Mega 2560 is a microcontroller board based on the ATmega2560. It has 54 digital input/output pins (of which 15 can be used as PWM outputs), 16 analog inputs, 4 UARTs(hardware serial ports), a 16 MHz crystal oscillator, a USB connection, a power jack, an ICSP header, and a reset button. It contains everything needed to support the microcontroller; simply connect it to a computer with a USB cable or power it with a AC-to-DC adapter or battery to get started. The Mega is compatible with most shields designed for the Arduino Duemilanove or Diecimila.





The Mega 2560 is an update to the Arduino Mega, which it replaces.
Each of the 54 digital pins on the Mega can be used as an input or output, using pinMode(), digitalWrite(), and digitalRead() functions. They operate at 5 volts. Each pin can provide or receive a maximum of 40 mA and has an internal pull-up resistor (disconnected by default) of 20-50 kOhms.
The ATmega2560 on the Arduino Mega comes preburned with a bootloader that allows you to upload new code to it without the use of an external hardware programmer. It communicates using the original STK500 protocol.
Orange Wire: PWM output from pin9 to Motor Control Input
Red Wire: +6V supply for Motor
Black Wire: 0V (Ground)
Connect the Supply to the board (5-12V DC). Connect USB with PC and upload the sketch to the board.
On connecting the board first time, it’ll ask for the drivers (which can be downloaded from arduino website).
Open Arduino IDE and Create a new Sketch (In Arduino world code/program is called a ‘sketch’).
Write the code and ‘verify’ (option on toolbar) it. After verifying it will notify if there are any errors otherwise ‘Done Compiling’ will be shown.
Now Upload the sketch to the Hardware. When sketch is Uploaded, Press Reset on the board. Now connect Servo control Pin at respective Pin and provide supply to it. The Pin9 of PWM port of the board provides motor control.
Project Source Code
###
#include <Servo.h>
Servo servo1; // create servo object to control a servo
int posn = 0; // variable to store the servo position
void setup()
{
servo1.attach (9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
for (posn = 0; posn < 180; posn += 1) // goes from 0 degrees to 180 degrees
{ // in steps of 1 degree
servo1.write (posn); // tell servo to go to position in variable 'pos'
delay (10); // waits 10ms for the servo to reach the position
}
for (posn = 180; posn>=1; posn-=1) // goes from 180 degrees to 0 degrees // in steps of 1 degree
{
servo1.write (posn); // tell servo to go to position in variable 'pos'
delay (10); // waits 10ms for the servo to reach the position
}
}
###
Управление сервоприводом
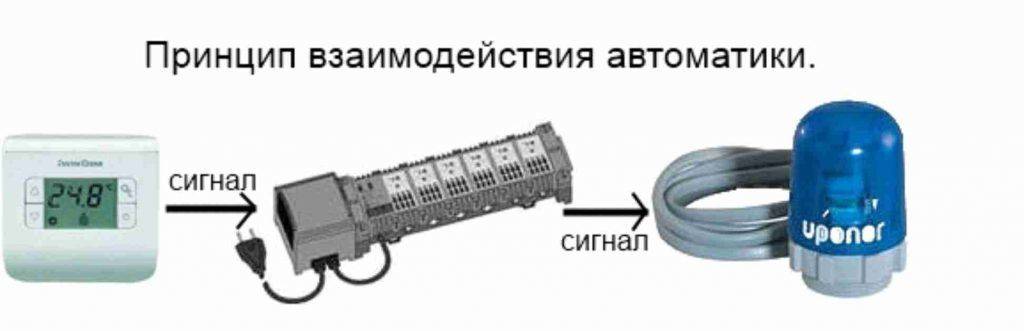
Решающее значение в управлении сервоприводами выполняет управляющий сигнал, который представляет собой импульсы постоянной частоты и переменной ширины. Длина импульса – это один из важнейших параметров, который определяет положение сервопривода. Эту длину можно задать в программе вручную методом подбора через угол или использовать команды библиотеки. Для каждой марки устройства длина может быть различной. Когда сигнал попадает в управляющую схему, генератор подает свой импульс, длительность которого определяется с помощью потенциометра. В другой части схемы происходит сравнение длительности поданного сигнала и сигнала с генератора. Если эти сигналы разные по длительности, включается электромотор, направление вращения которого определяется тем, какой из импульсов короче. При равенстве длины импульсов мотор останавливается.
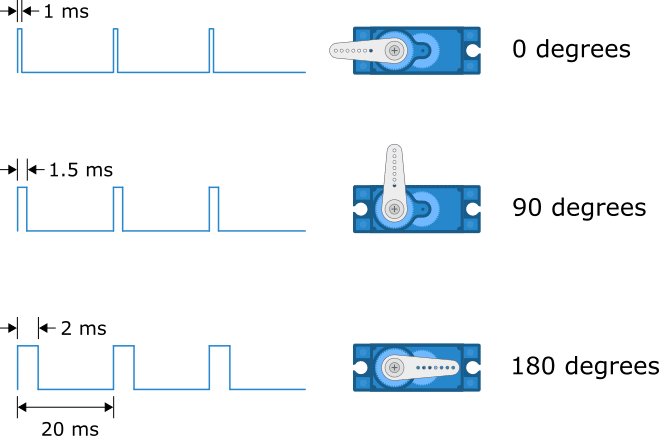
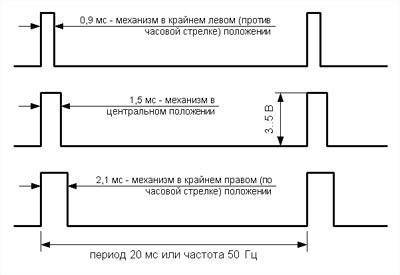 Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки. Имеются границы длительности – в Ардуино в библиотеке Servo для 0° установлено значение импульса в 544 мкс (нижняя граница), для 180° – 2400 мкс (верхняя граница).
Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки. Имеются границы длительности – в Ардуино в библиотеке Servo для 0° установлено значение импульса в 544 мкс (нижняя граница), для 180° – 2400 мкс (верхняя граница).
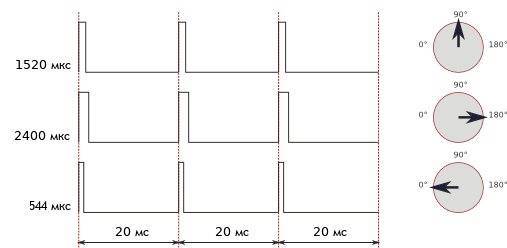
(Использовано изображение с сайта amperka.ru)
Важно учитывать, что на конкретном устройстве настройки могут несколько отличаться от общепринятых значений. У некоторых устройств среднее положение и ширина импульса может быть равной 760 мкс. Все принятые значения также могут незначительно отличаться из-за погрешности, которая может быть допущена при производстве устройства
Все принятые значения также могут незначительно отличаться из-за погрешности, которая может быть допущена при производстве устройства.
Способ управления приводом часто по ошибке называют PWM/ШИМ, но это не совсем корректно. Управление напрямую зависит именно от длины импульса, частота их появления не так важна. Корректная работа будет обеспечена как при 40 Гц, так и при 60 Гц, вклад внесет только сильное уменьшение или увеличение частоты. При резком спаде сервопривод начнет работать рывками, при завышении частоты выше 100 Гц устройство может перегреться. Поэтому правильнее называть PDM.
По внутреннему интерфейсу можно выделить аналоговые и цифровые сервоприводы. Внешних отличий нет – все различия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровой – микропроцессор, принимающий и анализирующий импульсы.

При получении сигнала аналоговый сервопривод принимает решение, менять или нет положение, и по необходимости подает на мотор сигнал с частотой 50 Гц. За время реакции (20 мс) могут произойти внешние воздействия, которые изменят положение сервопривода, и устройство не успеет среагировать. Цифровой сервопривод использует процессор, который подает и обрабатывает сигналы с большей частотой – от 200 Гц, поэтому он может быстрее отреагировать на внешние воздействия, быстрее развивать нужную скорость и крутящий момент. Следовательно, цифровой сервопривод будет лучше удерживать заданное положение. При этом для работы цифрового сервопривода требуется больше электроэнергии, что повышает их стоимость. Большой вклад в цену делает и сложность их производства. Высокая стоимость – единственный недостаток цифровых сервоприводов, в техническом плане они намного лучше аналоговых устройств.
Conclusion
In this tutorial, I have shown you how to use servo motors with Arduino. We looked at the basics of controlling the position and speed of servo motors, how to control a servo motor with a potentiometer, and how to control multiple servo motors at the same time.
I hope you found this article useful and informative. If you did, please share it with a friend who also likes electronics and making things!
I would love to know what project you plan on building or have already built with servo motors and the Arduino. If you have any questions, suggestions, or if you think that things are missing in this tutorial, please leave a comment below.
Note that comments are held for moderation to prevent spam.
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
Other Useful Links From Around The Web:
- Project Example with the I2C
- Another simple project example
- Circuit Geeks I2C LCD tutorial
- Micro Controllers Lab I2C LCD tutorial
- Useful YouTube Tutorial on the I2C LCD with Arduino
Сервопривод крышки багажника
Современные автомобили большей частью выпускаются с автоматическим открыванием и закрыванием багажника. Для этого требуется установка сервопривода. Производители применяют 2 способа, чтобы обеспечить авто подобной опцией. Надежным вариантом является пневмопривод, но он стоит дороже. Электропривод управляется несколькими способами на выбор:
- с пульта;
- кнопка на дверной панели водителя;
- ручка на крышке багажника.
Ручное открывание не всегда удобное, особенно зимой, когда замок может замерзнуть. Сервопривод багажника совмещается с замком, что дополнительно защищает авто от несанкционированного проникновения.
Устройства применяются на иномарках, но при желании их можно установить на отечественных моделях. Предпочтительно использовать привод с электродвигателем.
Есть еще устройства с магнитными пластинами, но они сложней и применяются реже.
Самыми дешевыми являются электроприборы, предназначенные только для открывания. Можно подобрать привод багажника, состоящий из электродвигателя с инерционным механизмом, отключающийся при возникновении препятствия перемещению. Дорогие модели состоят из устройства подъема и опускания крышки, доводчика запорного механизма, контроллера и датчиков.



Установка и настройка сервопривода крышки багажника производятся на заводе, но простые устройства могут быть установлены своими руками.
Servo control
Servo motors are controlled by sending a PWM (pulse-width modulation) signal to the signal line of the servo. The width of the pulses determines the position of the output shaft. When you send the servo a signal with a pulse width of 1.5 milliseconds (ms), the servo will move to the neutral position (90 degrees). The min (0 degrees) and max (180 degrees) position typically correspond to a pulse width of 1 ms and 2 ms respectively. Note this can vary slightly between different types and brands of servo motors (e.g. 0.5 and 2.5 ms). Many servos only rotate through about 170 degrees (or even only 90) but the middle position is almost always at 1.5 ms.
For adjusting the min and max position in the code, .
Servo motors generally expect a pulse every 20 milliseconds or 50 Hz but many RC servos work fine in a range of 40 to 200 Hz.
Обзор популярных моделей сервоприводов
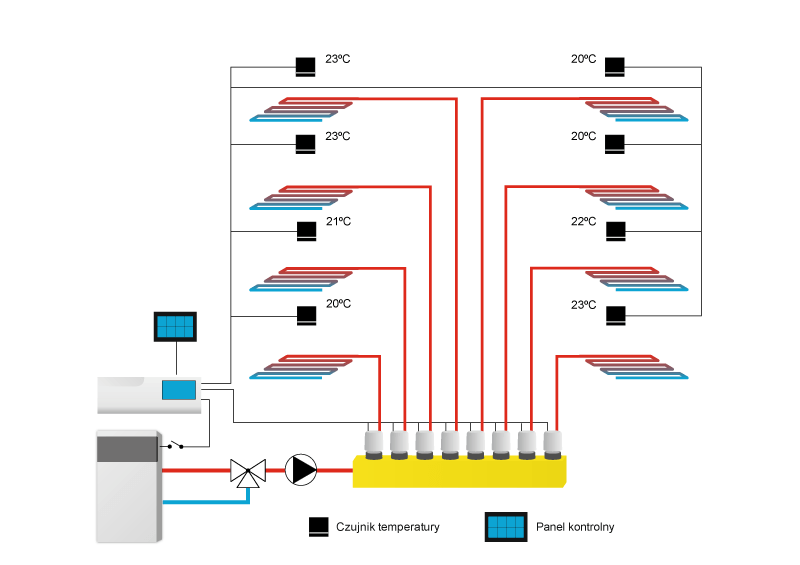
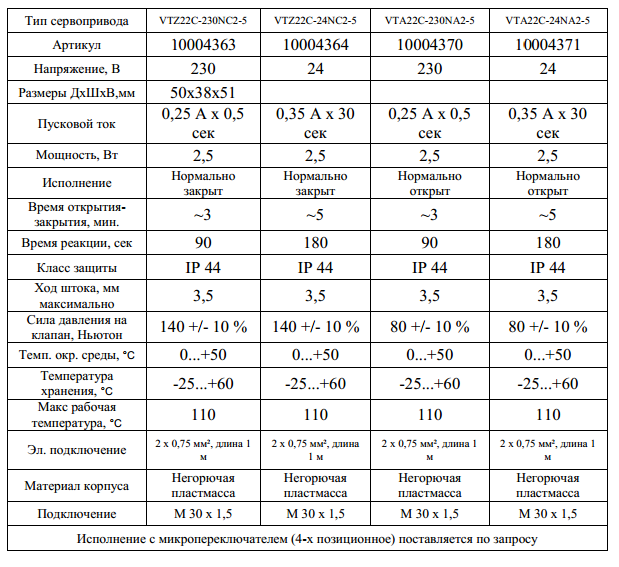
Сервоприводы для водяного теплого пола выпускаются разными производителями. Каждая модель имеет свои особенности.
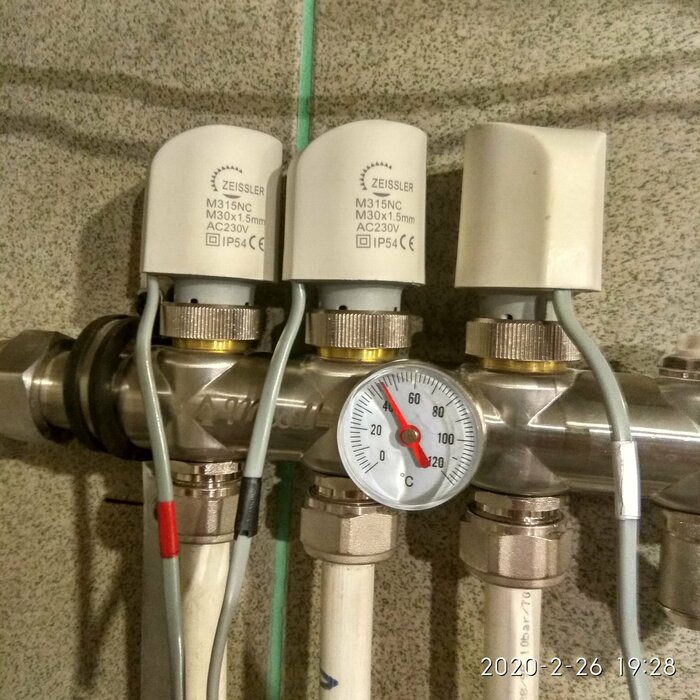
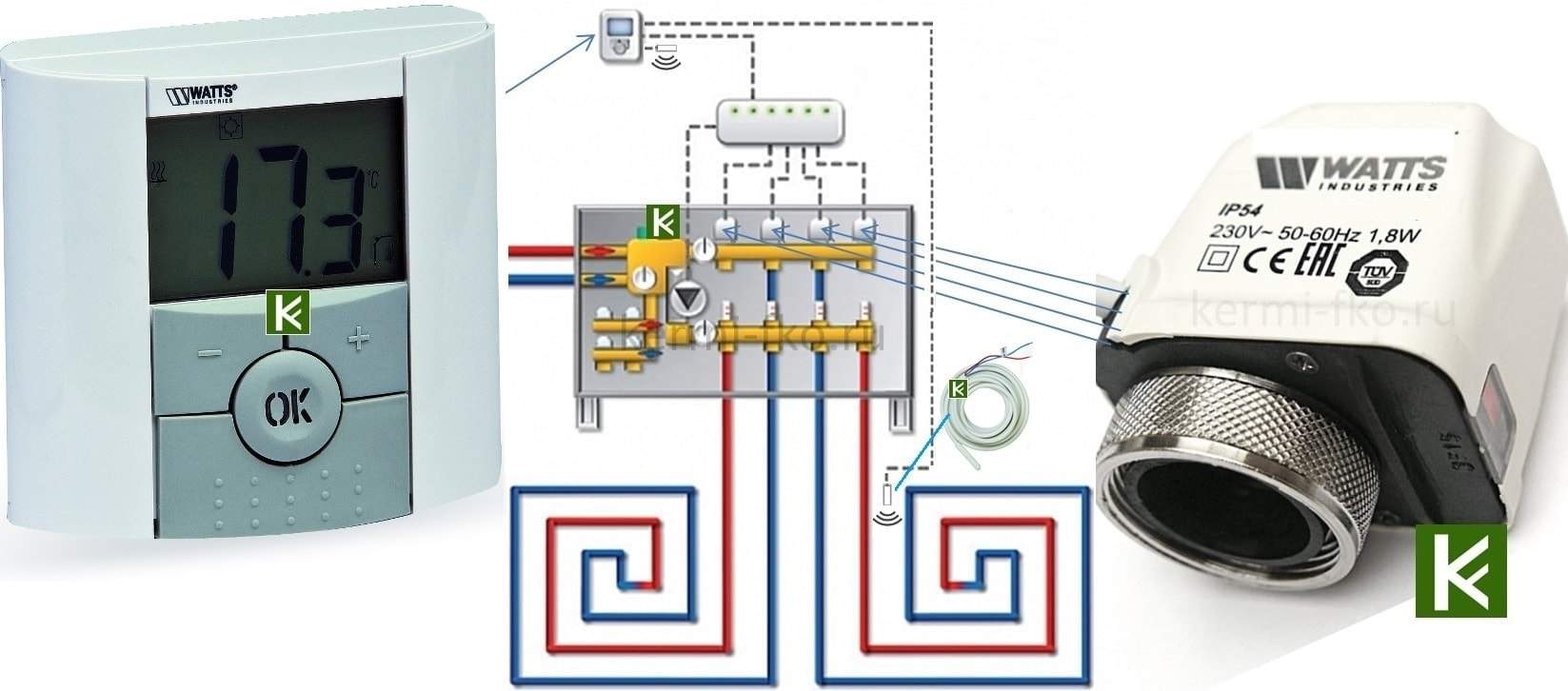
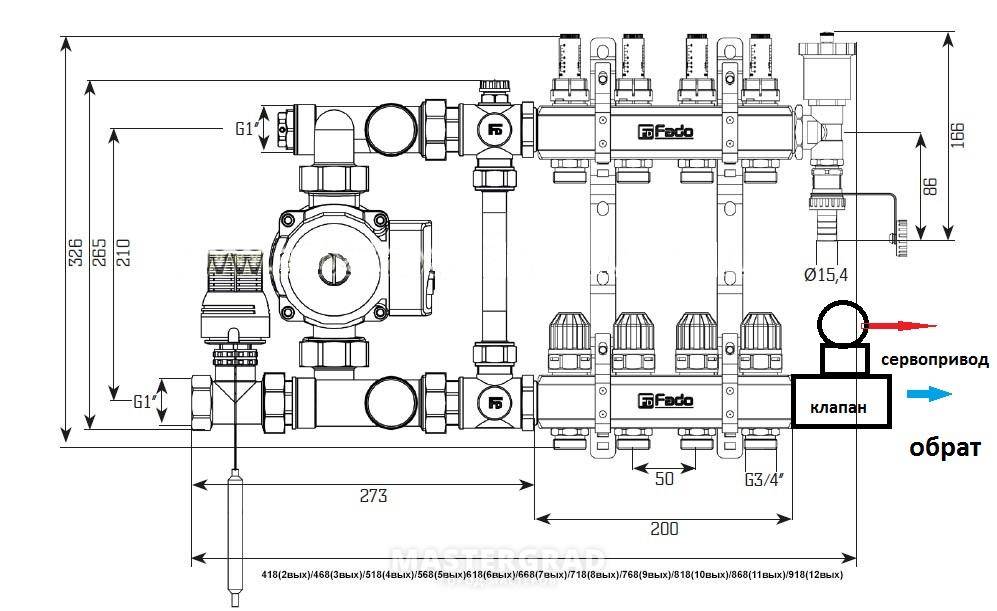
Сервопривод для отопления
VALTEC
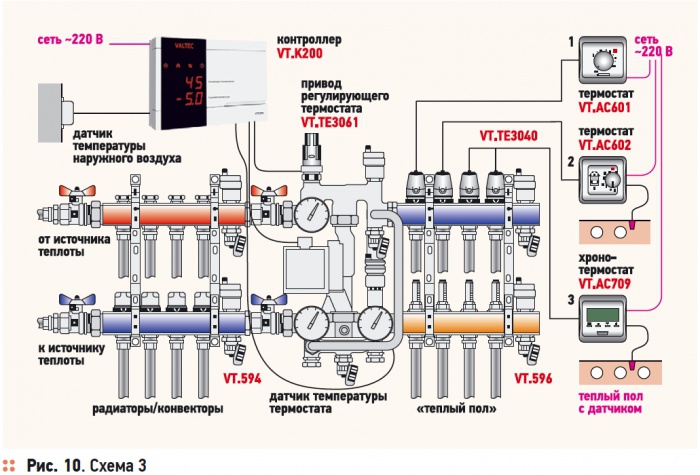
VALTEC – это производитель приборов для устройства водо- и теплоснабжения для дома. Над созданием продукции совместно работает группа из российских и итальянских специалистов. VALTEC выпускают следующие приводы для обеспечения регулировки работы отопительной системы напольного типа:
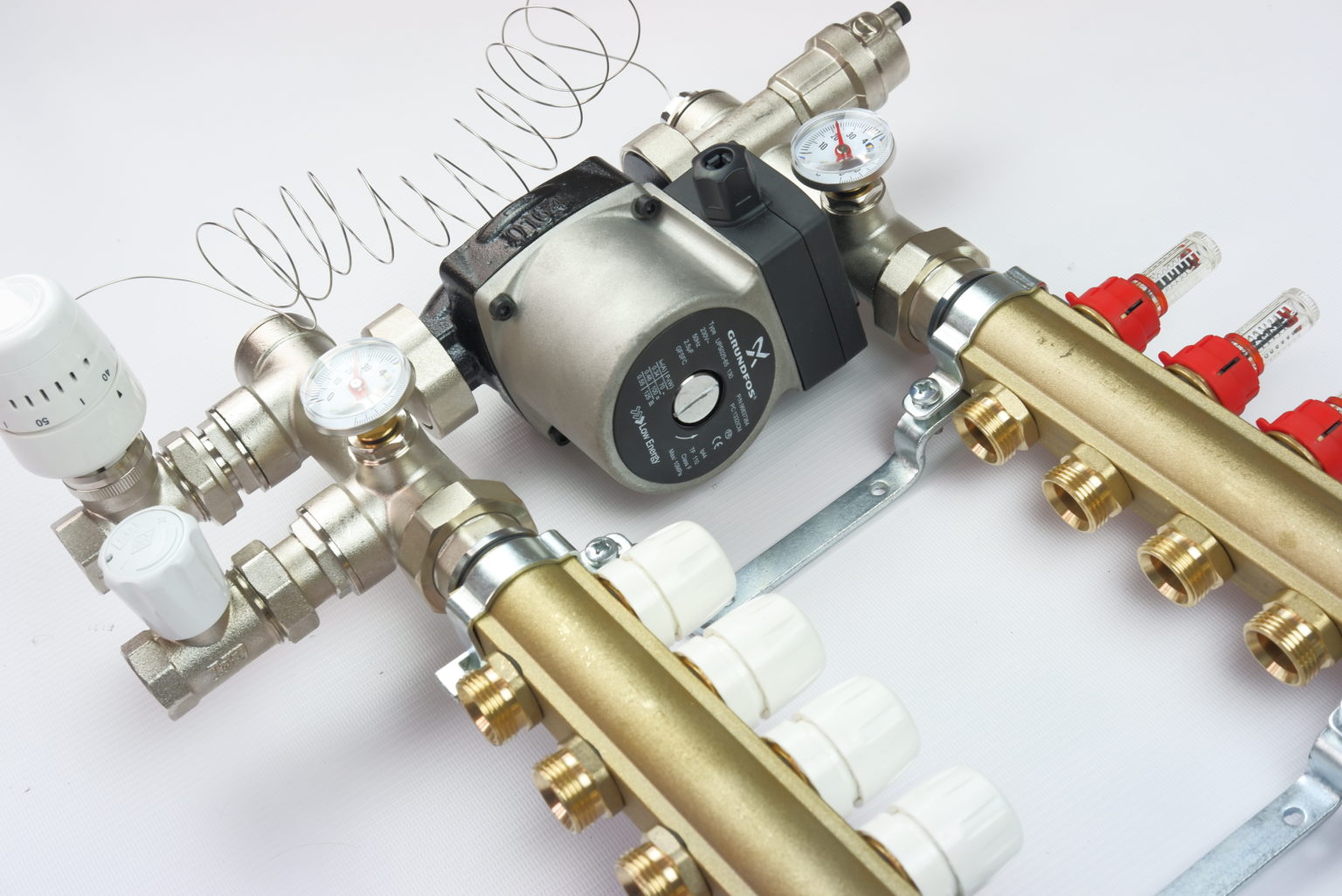
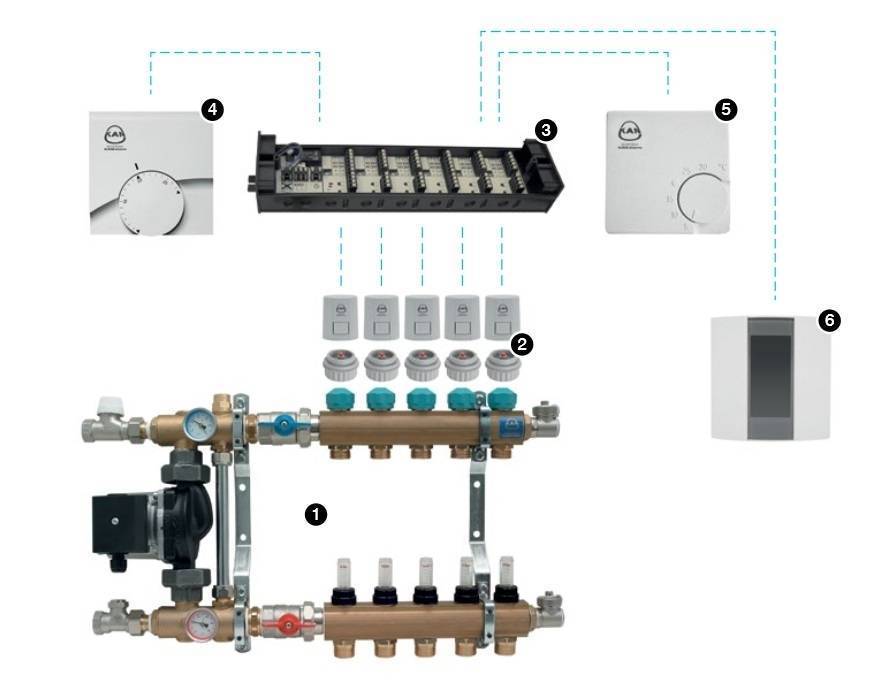
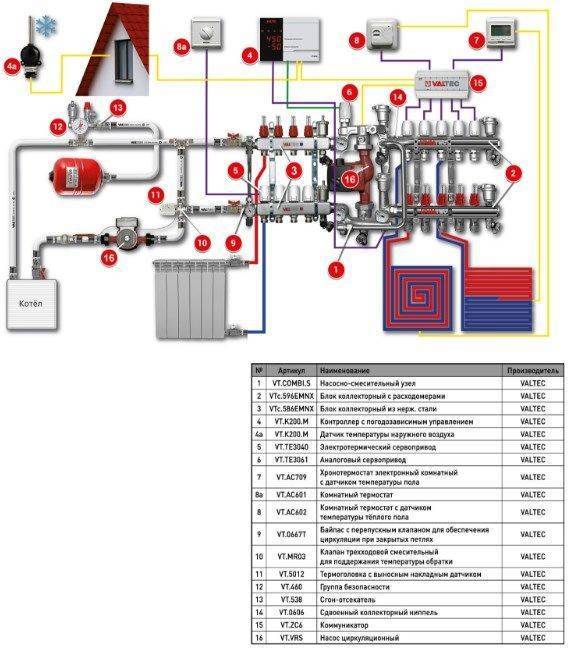 Комбинированная система отопления VALTEC
Комбинированная система отопления VALTEC
- TE3042.A. Относится к группе нормально открытых. Предназначены для управления клапанами климатических систем по командам, которые будет задавать термостат, контроллер или ручной переключатель. Мощность устройства – 2 Вт, сечение проводника – 0,75 кв. мм. Присоединительный размер составляет М30х1,5;
- TE3061.0. Это электротермический прибор нормально закрытый. Предназначен для трехходовых клапанов. Работа устройства возможна благодаря температурному расширению жидкости – толуола. Мощность привода – 2 Вт, сечение проводников – 0,22 кв. мм;
- TE3041A.0. Устройство работает благодаря наличию в корпусе жидкости, которая расширяется под воздействием температуры. Относится к группе нормально открытых. Подключение к клапану происходит через переходник, который входит в комплект. Мощность агрегата – 1,8 Вт, сечение проводников – 0,75 кв. мм.
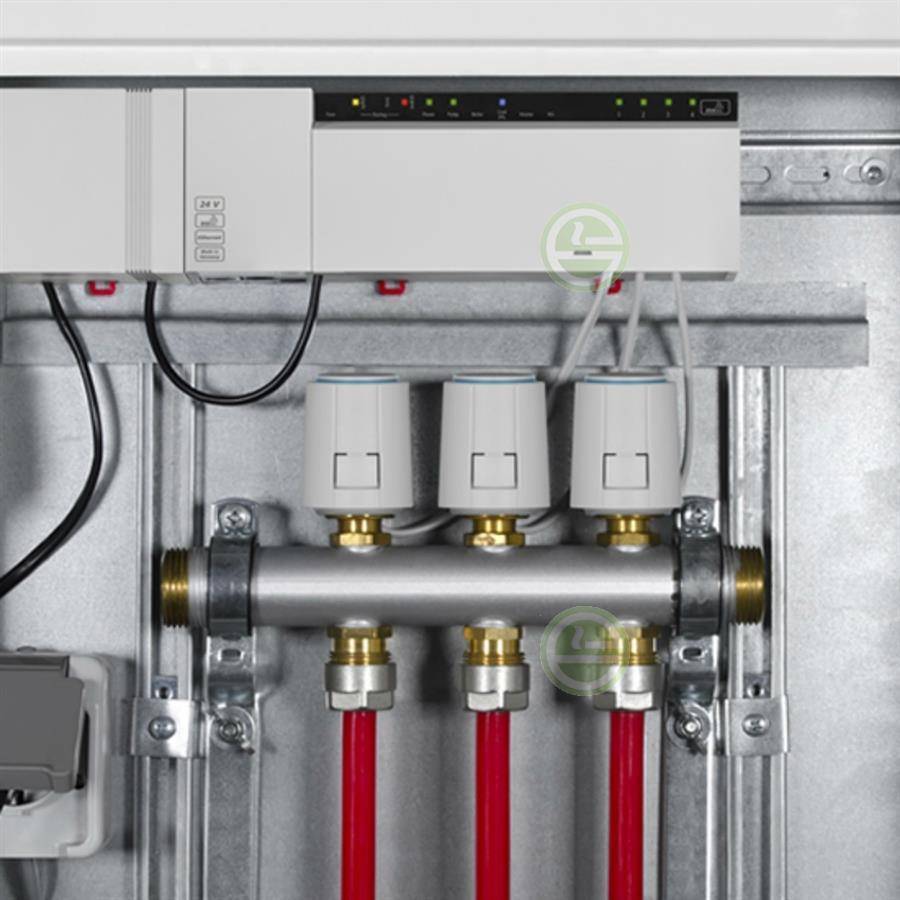
Watts
Watts – это ведущий мировой производитель отопительной техники разного формата. Отличается высоким качеством, демократичной ценой и эффективностью. Сервоприводы от Watts – это модели с электромагнитным двигателем. Популярные серии:
 Технические характеристики электротермического сервопривода WATTS
Технические характеристики электротермического сервопривода WATTS
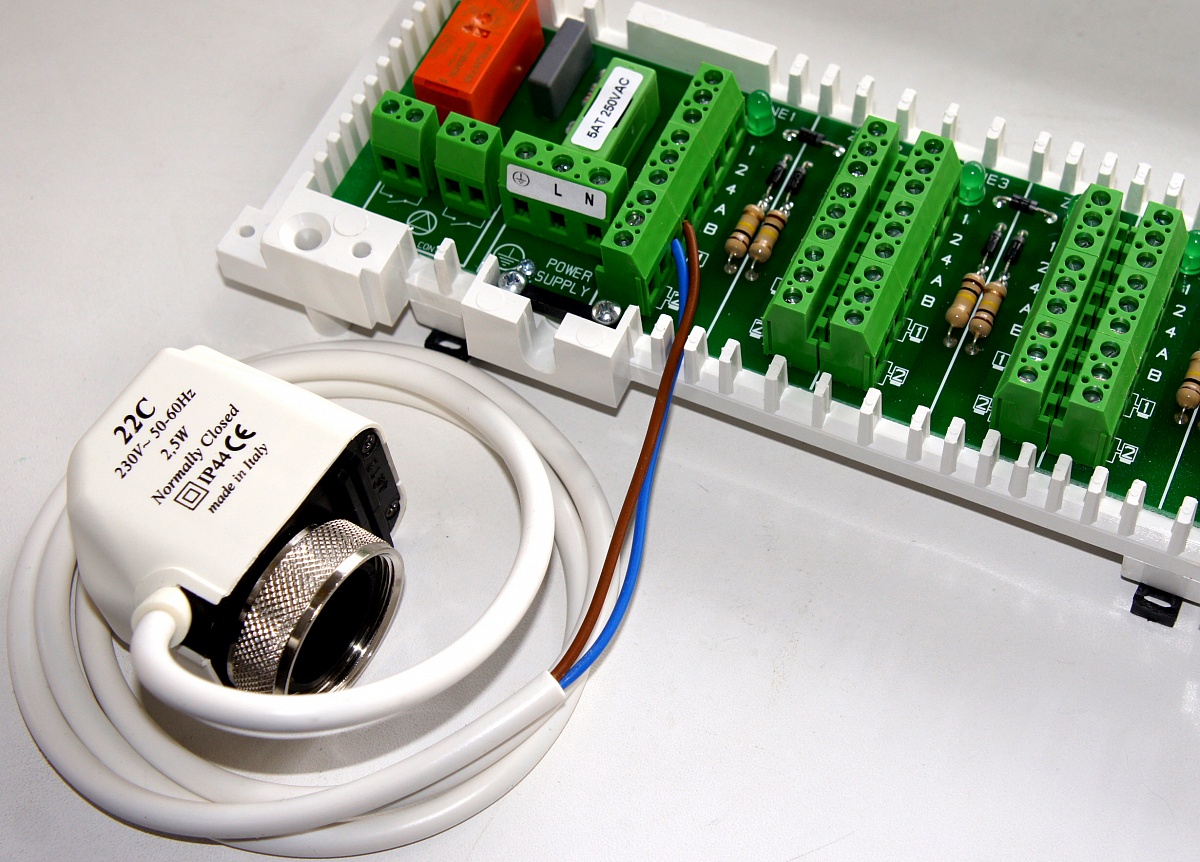
- 22С. Устанавливается на вентиле обратного трубопровода и регулирует подачу теплоносителя в систему напольного отопления. Мощность составляет 2,5 Вт. В зависимости от модели в серию 22С входят устройства нормально открытые и закрытые. Класс защиты – IP44;
- 22СХ. Относятся к электротермическим приборам для обеспечения эффективной работы водяного теплого пола. Существуют модели нормально закрытые и открытые. Уровень потребляемой мощности в нормальном режиме работы – 1,8 Вт. Рабочая температура жидкости в системе – +110°С;
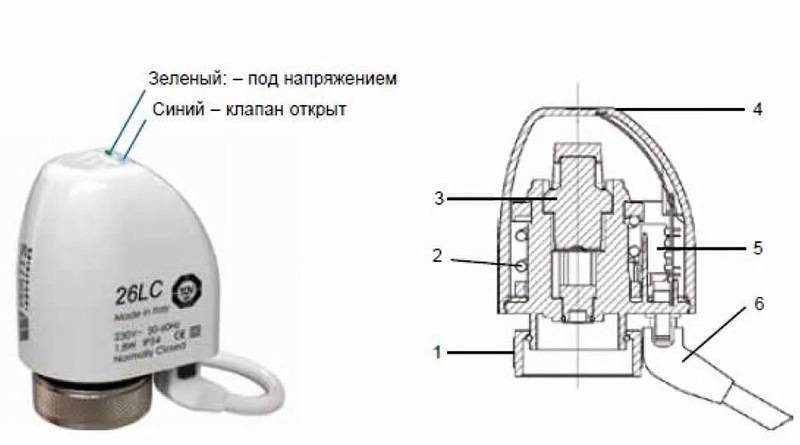
- 26LC. Электротермические приводы для коллектора. На корпусе размещается светодиодный индикатор, который указывает на его режим работы. Если загорается зеленый – на привод подается напряжение, синий – прибор открыт.
REHAU
Приводы для регулировки работы водяного теплого пола от немецкого производителя. Сочетают в себе инновационные разработки и проверенное годами качество. Самые популярные модели от REHAU:
- UNI на 230, 24 В. Монтаж устройства происходит на вентилях коллекторной группы при помощи специального адаптера. Относится к приборам нормально закрытым. Контроль над работой привода осуществляется через индикатор. Присоединительные кабели сечением 2х0,5 кв. мм;
- привод 230, 24 В. В обесточенном состоянии вентиля находится в закрытом состоянии. Для контроля функционирования устройства на корпусе размещается световой индикатор.
 Таблица характеристики сервоприводов Rehau
Таблица характеристики сервоприводов Rehau
LUXOR
Итальянская компания LUXOR специализируется на производстве водозапорной арматуры и систем для регулировки температуры отопительной системы для дома. В составе устанавливаемой коллекторной группы будет присутствовать привод SM 1347. Он предназначен для регулирования температуры подаваемого теплоносителя для теплого водяного пола. Основные технические характеристики прибора:
- питание – 24 В;
Коллекторная группа системы отопления и теплого пола Luxor
- работа устройство обеспечивается шаговым двигателем. Его управление – электронное;
- на корпусе присутствует светодиодная индикация, которая указывает на режим работы;
- монтаж происходит в прямом положении – вертикальном или горизонтальном;
- максимальная температура в системе – +100°С;
- кабель длиною 1,5 м;
- температура хранения прибора – от 0 до +50°С;
- корпус изготовлен из синтетических материалов. Его цвет – серый;
- наличие гарантии – 2 года.
Независимо от выбранной модели, монтаж сервопривода и его эксплуатация должна проходить в соответствии с рекомендациями от производителя. С ними можно ознакомиться в инструкции к прибору. После установки привода и всех элементов системы приступают к их использованию после полного тестирования.