Виды сервопривода
Сервоприводы подразделяют на электромеханические. В них механизм состоит из электродвигателя и редуктора. Отличаются относительно невысоким быстродействием.
Различают по типу примененного двигателя:
- синхронные, имеют высокую точность вращения выходного вала, быстро набираю обороты;
- асинхронные, отличаются стабильным вращением вала;
- с коллекторным двигателем постоянного или переменного тока (универсальным).
Сервоприводы, где движущим механизмом является поршень с цилиндром, имеют высокое быстродействие. Применяется в автомобиле для переключения скоростей в АКПП. Монтируется в роботах, перемещающих грузы более ста килограмм. В промышленных установках, для переключения заслонок в упаковочных автоматах, где в качестве энергоносителя применяют сжатый воздух.
Основные характеристики сервопривода:
- Основным параметром является крутящий момент или усилие на валу. В паспортных данных указываются две величины, относительно разного напряжения питания.
- Быстродействие, показывает, за какой промежуток времени произойдет поворот выходного вала на 60. Указываются значения для разной величины напряжений.
- Какой используется управляющий сигнал, аналоговый или цифровой.
- Питающее напряжение. Большинство небольших приводов питается напряжением от 4,8 до 7,2 Вольт. Применяется, например, в радиоуправляемых моделях. Комплектуется тремя проводами и имеет стандартную распиновку. На белый, коричневый или желтый подается сигнал управления, на красный напряжение питания, а черный – общий провод.
- Рабочий угол поворота, обычно он составляет 180 или 360. Выпускаются модернизированные приводы с постоянным вращением вала;
- Материал изготовления шестеренок редуктора. Они изготавливаются из латуни, карбона, пластика или могут быть комбинированные.
В электромеханическом сервоприводе применяются электродвигатели с сердечником, при работе которых возникает вибрация, когда происходит вращение маятника. Это уменьшает точность поворота выходного вала. Лишены этого недостатка моторы с минимальной кинетической энергией ротора. Такие привода необходимы для ЧПУ станка, чтобы точно установить исполнительный механизм. Однако, они дороже двигателей с сердечником.
Самым распространенным редуктором является шестеренчатый, который предназначен для понижения частоты вращения и увеличения момента на выходном валу. Реже применяют привод с червячным редуктором, который имеет большое передаточное число, но дороже и сложнее в производстве.
Скетч для управления сервоприводом в Arduino
Алгоритм работы прост:
- Для начала мы подключаем Servo.h
- Создаем объект класса Servo
- В блоке setup указываем, к какому пину подключен серво
- Используем методы объекта обычным для C++ способом. Самым популярным является метод write, которому мы подаем целочисленное значение в градусах (для сервопривода 360 эти значения будут интерпретироваться по-другому).
Пример простого скетча для работы с сервоприводом
Пример проекта, в котором мы сразу сначала устанавливаем серводвигатель на нулевой угол, а затем поворачиваем на 90 градусов.
Управление сервоприводом с помощью потенциометра
В этом примере поворачиваем серво в зависимости от значения, полученное от потенциометра. Считываем значение и преобразовываем его в угол с помощи функции map:
Замена сервомотора
Замена сервомотора является неизбежной процедурой при возникновении проблем с его работой или необходимости улучшить его параметры для более эффективной работы. При замене сервомотора необходимо учесть несколько факторов, чтобы обеспечить корректное подключение и работу нового устройства.
Во-первых, при выборе нового сервомотора нужно обратить внимание на его технические характеристики, такие как мощность, скорость, момент, диапазон работы и энергопотребление. Эти параметры должны соответствовать требованиям вашего проекта и выполнять необходимые задачи
Во-вторых, перед заменой сервомотора необходимо провести предварительное обследование системы и проверить совместимость нового устройства с текущей аппаратурой и драйвером
Для этого следует обратить внимание на тип и интерфейс сервомотора, а также его вольтаж и протокол связи
После выбора и покупки нового сервомотора необходимо выполнить процедуру его замены. Для этого следует отключить старый сервомотор от драйвера, освободить его от крепежных элементов и аккуратно установить новый мотор на его место
Также необходимо обратить внимание на правильное подключение проводов и провести тестирование нового устройства перед его использованием в работе
Важно помнить, что замена сервомотора может потребовать изменения программного обеспечения или настройки параметров на драйвере. Поэтому перед первым использованием нового сервомотора необходимо проверить его работоспособность и правильность настроек
Технические характеристики
При выборе конкретной модели сервопривода необходимо руководствоваться основными техническими параметрами, которые изготовитель указывает в паспорте устройства.
Наиболее значимыми характеристиками сервомотора являются:
Усилие на валу серводвигателя – определяет механический момент и способность перемещать определенный вес, создавать усилие при резке, фрезеровке и т.д.
Рис. 6. Усилие на валу
- Скорость вращения – показывает, сколько поворотов вала может совершить устройство за единицу времени.
- Величина питающего напряжения – чаще всего электроснабжение сервопривода выполняется постоянным током, хотя встречаются модели и с переменным током выходного напряжения. Подключение питания к сервоприводу осуществляется тремя проводами: питающим, управляющим и общим.
- Угол вращения сервопривода – поворот выходного элемента, как правило, выпускается на 180° и 360°.
- Скорость поворота – подразделяется на сервоприводы с постоянным вращением и с переменной частотой.
Сервопривод – что это такое
Под этим понятием обычно подразумевают оснащенный электромотором механизм, который можно разместить под нужным углом и зафиксировать в одном положении. Но данное определение недостаточно емкое, поэтому его можно и нужно дополнить.
Это также силовой агрегат, управление которым реализовано через отрицательную обратную связь. Именно последняя дает возможность чутко контролировать заданные параметры перемещения. И у него просто должен быть датчик – позиции, нагрузки, скорости – и блок контроля, который поддерживает необходимые условия в автоматическом режиме.







![Драйвер сервоприводов multiservo shield v1 [амперка / вики]](https://zakazkolodca.ru/wp-content/uploads/6/4/1/64140fb4b8e3867b29047016d8ab8658.jpeg)

В числе самых распространенных сегодня находятся модели, сохраняющие установленный угол и/или интенсивность выполнения технологической операции.
Сервопривод переменного тока
В сервоприводах переменного тока используется синхронный двигатель с мощными постоянными магнитами. В таких двигателях частота вращения ротора совпадает с частотой вращения магнитного поля, наводимого в обмотке статора.
Принцип работы сервопривода на основе трехфазного синхронного электродвигателя состоит в следующем. На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На валу ротора закреплен энкодер с высокой разрешающей способностью. Сигнал от него поступает по отдельному кабелю на специальный вход сервоусилителя. В то же время на управляющий вход сервоусилителя подается сигнал управления. В результате сравнения этих двух сигналов выделяется сигнал рассогласования, величина которого прямо пропорциональна разнице между целевыми и актуальными показателями вращения двигателя. На основании данного сигнала формируется трехфазное напряжение с такими параметрами, которые обеспечивают максимально быстрое уменьшение рассогласования до нуля.
Виды сервоприводов
Их классифицируют главным образом по типу используемого двигателя, выделяя:
- синхронные – отличаются быстрым набором оборотов, а также прецизионным вращением;
- асинхронные – их ключевая черта в высокой стабильности поведения вала;
- универсальные – оснащены коллекторным силовым агрегатом, либо переменного, либо постоянного тока.
Первые особенно востребованы в автомобилестроении и активно устанавливаются в АКПП – для беспроблемного переключения передач. Также они актуальны для спецтехники, транспортирующей грузы весом свыше 100 кг. Вторые и третьи больше ориентированы на различное промышленное оборудование.
Если всесторонне рассматривать серводвигатель – что это такое, принцип работы, разновидности, – то нужно уделить внимание и его основным рабочим параметрам. В списке ключевых характеристик всех его моделей:
- крутящий момент (создаваемое усилие) – обязательно прописывается в паспорте, причем сразу в двух величинах, для разного питающего напряжения;
- вариант подаваемого импульса, ведь можно управлять с помощью как цифрового, так и аналогового сигнала;
- быстродействие – определяет время, за которое вал перемещается (по часовой стрелке или против нее) на 60 градусов;
- поддерживаемый угол поворота – обычно это либо 180 0 (полуцикл), либо 360 0 (полный); хотя сегодня есть модифицированные модели, у которых вращение осуществляется непрерывно;
- материал исполнения редукторных шестеренок – это может быть пластик, карбон, латунь или композит;
- напряжение – варьируется в диапазоне от 4,8 до 7,2 В (у основной группы силовых агрегатов);
- цвета проводов и распиновка – обычно все стандартно: черный – общий, красный – питания, белый (желтый или коричневый) – контроля.
Еще немного нюансов: устройство сервомотора может предполагать наличие двигателя с сердечником. Это не лучший вариант, так как при его функционировании появляются вибрации, которые снижают точность вращения вала. Поэтому практичнее выбирать модели, у которых кинетическая энергия ротора на практике будет минимальной, даже несмотря на то, что они стоят несколько дороже. Это особенно актуально в случаях с эксплуатацией ЧПУ-станков, выполняющих сложные детали.
Еще один важный фактор различия видов – габаритные размеры, а именно соотношение ДхШхВ и вес. В соответствии с ними выделяют три группы силовых агрегатов:
- малые – 22 на 15 на 25 мм и до 25 г;
- стандартные (средние) – 40 на 20 на 37 мм и до 80 г;
- большие – 49 на 25 на 40 мм и до 90 г.
Следующее различие – по интерфейсу:
- аналоговые – импульсы обрабатывает микросхема;
- цифровые – сигналы считывает процессор.
Решая, для чего нужен сервопривод, помните, что нюансы – в начинке, а внешнее исполнение может быть абсолютно одинаковым.
Также разнообразие моделей можно разделить по материалу шестеренок – на такие группы:
- с пластиковыми (нейлоновыми) – легкими, стойкими к износу, но не к большим нагрузкам;
- с карбоновыми – более прочными, при этом не обладающими значительным весом, но и стоящими в несколько раз дороже предыдущих;
- с металлическими (латунными, титановыми) – тяжелыми, выдерживающими даже самый серьезный крутящий момент, но стирающимися друг о друга.
И, наконец, существуют варианты с сердечником (коллекторные) и без него. У первых есть полый ротор в несколько секций, между которыми появляется вибрация в процессе вращения. Поэтому они менее точны, чем те, чья подвижная часть полая, а также тяжелее и обеспечивают более долгий отклик, правда, и стоят дешевле.
Using multiple PCA9685 12-channel Servo motor drivers.
One of the major advantages of PCA9685 servo motor driver is that you can daisy-chain up to 62 of
these driver modules on a single I2C bus. This means that you can control up to 992 servos using only two I2C pins from the Arduino board.
To be able to use the different modules, you need to set a different I2C address for each board and this is done using the six-address selection solderable pads (A0 – A5) where you have to connect these pads depending on the address you like to give a specific board.
The table below shows some examples of how the solderable pads can be connected to assign specific I2C addresses. Normally the solderable pads come without any connection giving the default I2C address as 0x40.

The diagram below shows how you can daisy-chain three PCA9685 16-Channel servo motor driver modules. Each module has to be given a different I2C address by soldering the I2C address selection pads.
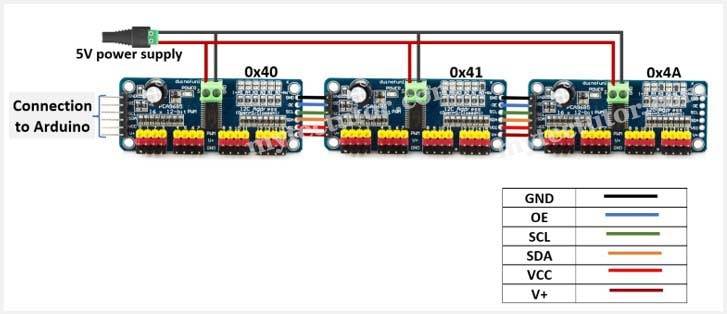
When writing code for controlling servo motors attached to these daisy-chained driver modules, you have to create a separate object for each board and also initialize each of these objects separately in the setup section of the code like demonstrated below.
Альтернативный способ выбора между шаговым и серводвигателем
Некоторые производители при выборе предлагают отталкиваться от мощности двигателей, требуемых для станка (см. статью Выбор шагового двигателя и мощности сервопривода). Для этого предлагается рассчитать коэффициент К по эмпирической формуле К = М * S / 58000, где М — масса движимой части (портала со шпинделем), S — требуемая скорость перемещения (мм/мин). Если К < 1, вам скорее всего подойдут шаговые двигатели. Если К > 2, ваш выбор серводвигатели. Если К лежит в пределах от 1 до 2, Вам могут подойти оба вида привода и Вам стоит ввести дополнительные критерии выбора для определения лучшего варианта.
См. также:
Область применения
Сервопривод нашел широкое применение в робототехнике и манипуляторах. При создании небольших механизмов используют сервопривод mg995 и ему подобные.

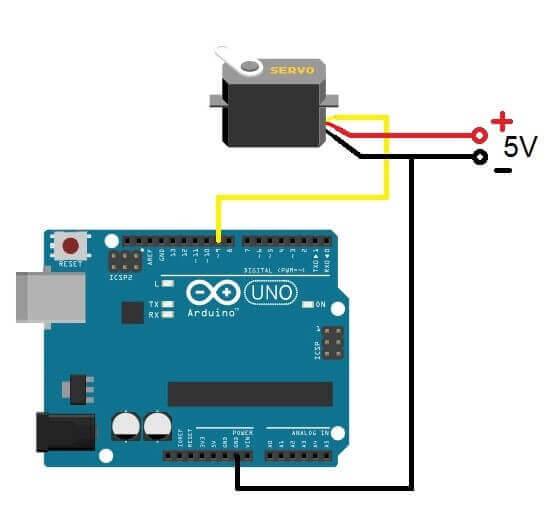
Для управления современными приводами в радиолюбительских изделиях часто используется представители семейства ардуино. Оно представляет набор электронных устройств, предназначенных для управления роботами и приборами автоматики, где применяется сервопривод. Управляющий сигнал может быть аналоговым или цифровым.
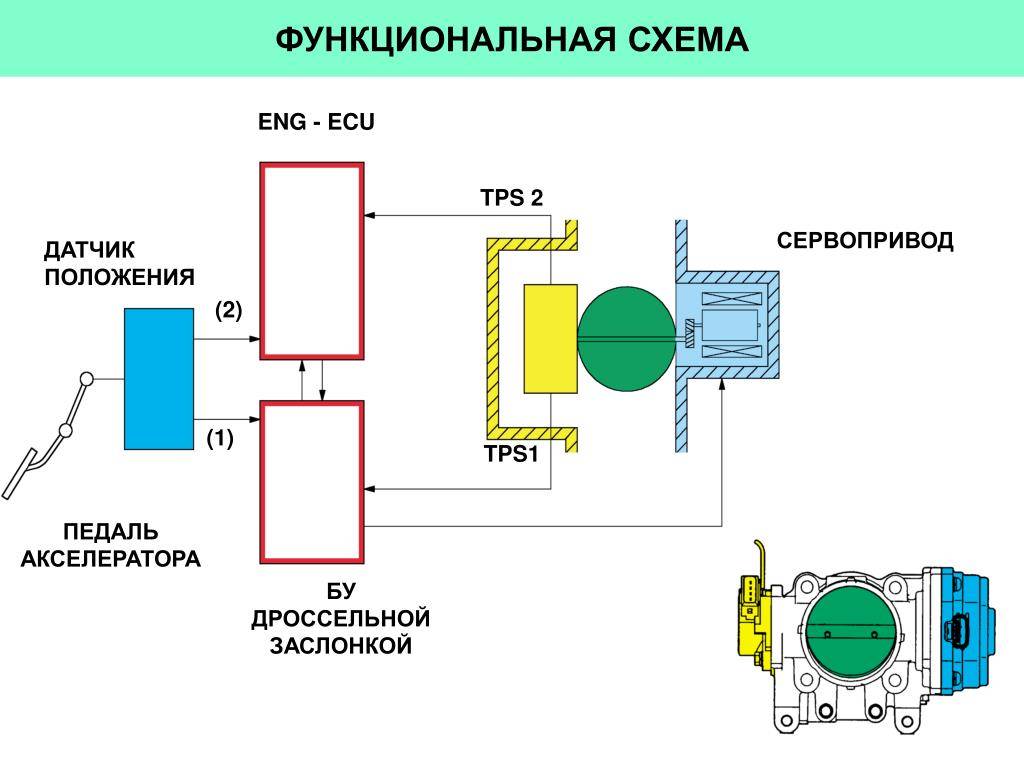
Схема подключения привода к устройству управления представлена на рисунке. Устройство может управлять несколькими приводами.

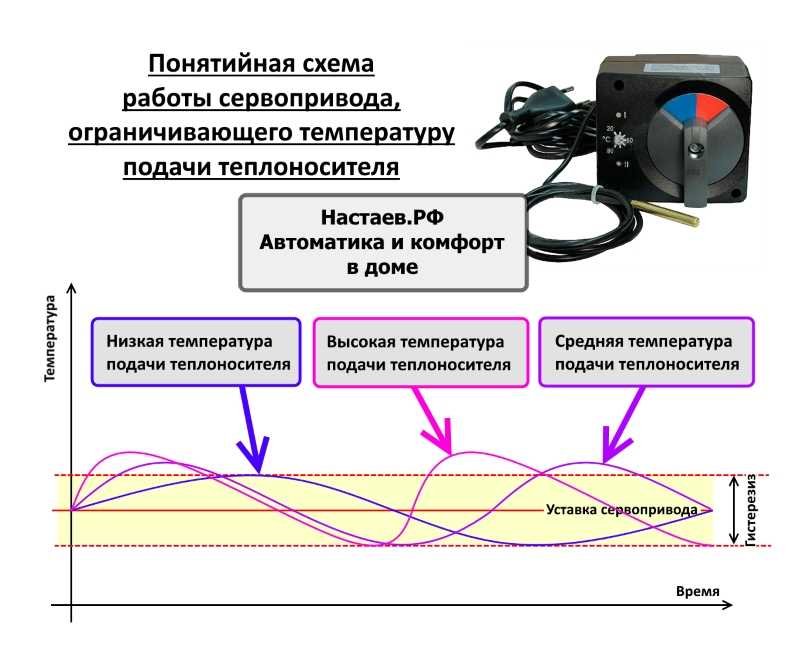




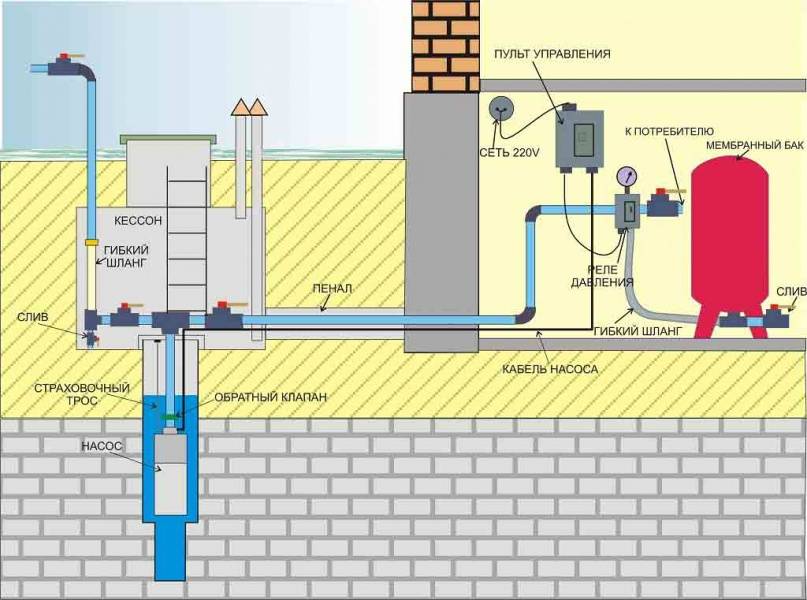
Для теплых полов используют автоматику, которая поддерживает заданную температуру. А подачу теплоносителя, который представляет собой горячую воду от отопительного котла, регулирует сервопривод.
Его подключают к устройству управления, которое контролирует температуру с помощью датчика температуры, и выдает команду на электротермический сервопривод типа RBM 24V. Также может применяться сервопривод АС230V с регулятором.

Регулирование температуры в отоплении осуществляется автоматикой, для чего используется сервопривод типа ICMA NC230V или NC24V. Приборы выпускаются на различное напряжение питания.

Унифицированный сервопривод, используемый в автомобиле, имеет малые габариты. Предназначен для работы с бортовым напряжением на 12 Вольт. Он интегрирован с центральным замком, устанавливается на все двери машины, в том числе и на пятую дверь (дверь багажника).
Также механизм управляет подачей горячей жидкости на печку. Работает в паре с термоэлектрическим датчиком, сигнал от которого поступает на устройство управления. После анализа датчик подает команду на сервопривод, который увеличивает или уменьшает подачу жидкости.
Например, для автомобилей ВАЗ применяют электропривод с редуктором SL-5.

Это далеко не полный перечень применения таких устройств.
Сервопривод для Ардуино
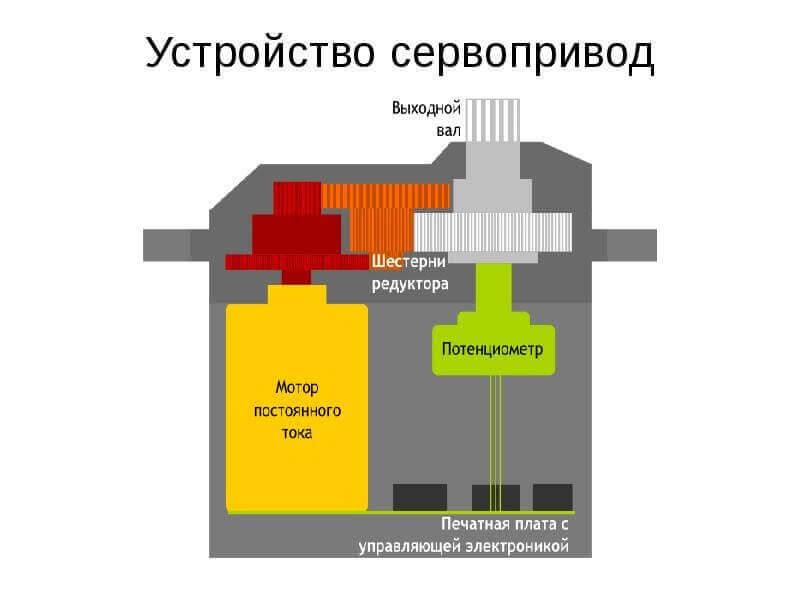
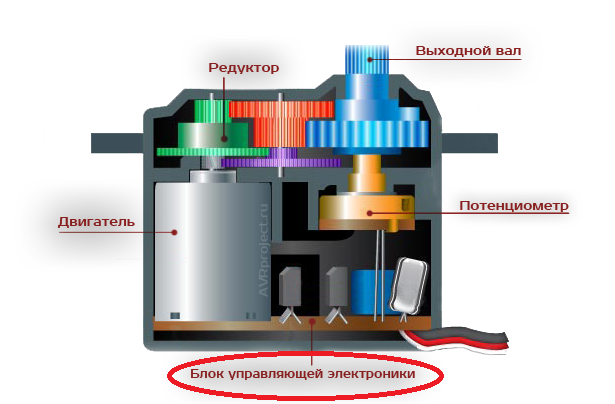
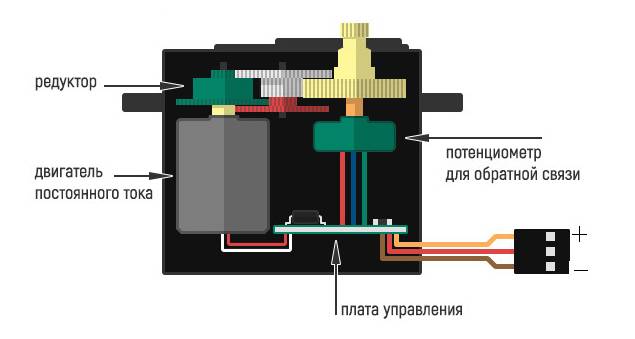
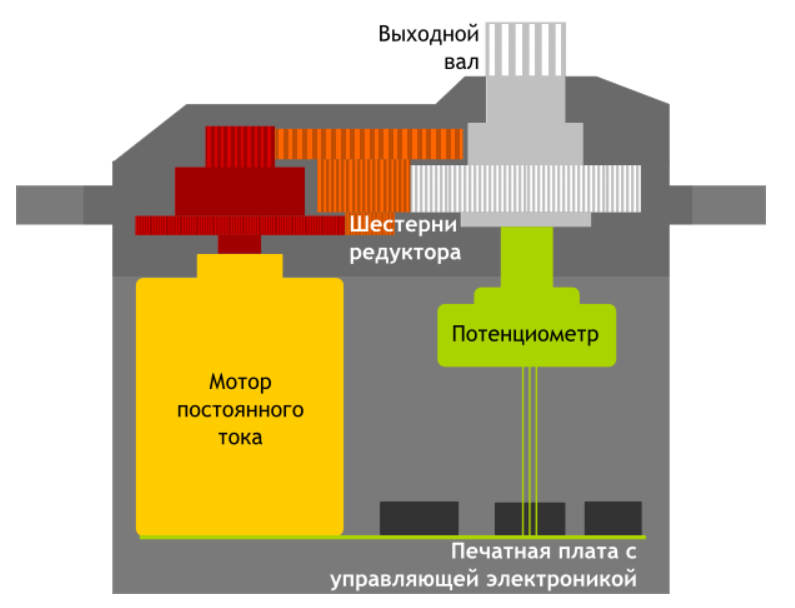
Сервопривод – это такой вид привода, который может точно управлять параметрами движения. Другими словами, это двигатель, который может повернуть свой вал на определенный угол или поддерживать непрерывное вращение с точным периодом. Схема работы сервопривода основана на использовании обратной связи (контура с замкнутой схемой, в котором сигнал на входе и выходе не согласован). В качестве сервопривода может выступать любой тип механического привода, в составе которого есть датчик и блок управления, который автоматически поддерживает все установленные параметры на датчике. Конструкция сервопривода состоит из двигателя, датчика позиционирования и управляющей системы. Основной задачей таких устройств является реализация в области сервомеханизмов. Также сервоприводы нередко используются в таких сферах как обработка материалов, производство транспортного оборудования, обработка древесины, изготовление металлических листов, производство стройматериалов и другие.
В проектах ардуино робототехники серво часто используется для простейших механических действий:
- Повернуть дальномер или другие датчики на определенный угол, чтобы измерить расстояние в узком секторе обзора робота.
- Сделать небольшой шаг ногой, движение конечностью или головой.
- Для создания роботов-манипуляторов.
- Для реализации механизма рулевого управления.
- Открыть или закрыть дверку, заслонку или другой предмет.
Конечно, сфера применения серво в реальных проектах гораздо шире, но приведенные примеры являются самыми популярными схемами.
Сравнение с шаговым двигателем
Другой вариант точного позиционирования ведомых элементов без датчика обратной связи — использование шагового двигателя. В этом случае схема управления отсчитывает необходимое количество импульсов (шагов) от исходного положения (эта характеристика обусловлена характерным шумом шагового двигателя в 3,5-дюймовых приводах и CD / DVD при повторной попытке его чтения). В этом случае точное позиционирование обеспечивается параметрическими системами с отрицательной обратной связью, которые образуются взаимодействием соответствующих полюсов статора и ротора шагового двигателя.Опорный сигнал для соответствующей параметрической системы генерируется системой управления шаговым двигателем система, которая активирует соответствующий полюс статора.
Поскольку датчик обычно управляет ведомым элементом, электрический сервопривод имеет следующие преимущества перед шаговым двигателем
- не предъявляет особых требований к электродвигателю и коробке передач — они могут быть практически любого желаемого типа и мощности (а шаговые двигатели, как правило, бывают маломощными и тихоходными);
- гарантирует максимальную точность, автоматически компенсируя: механические (люфт в приводе) или электронные неисправности в приводе;
- постепенный износ привода, при этом шаговый двигатель требует для этого периодической регулировки;
- тепловое расширение накопителя (во время работы или сезонное), что стало одной из причин перехода на сервопривод для позиционирования головок в жестких дисках;
- обеспечить немедленное обнаружение неисправности (выхода из строя) привода (механического или электронного);
- максимально возможная скорость движения элемента (у шагового двигателя самая низкая максимальная скорость по сравнению с другими типами электродвигателей);
- затраты энергии пропорциональны сопротивлению элемента (шаговый двигатель постоянно запитан номинальным напряжением с запасом на возможную перегрузку);
Недостатки по сравнению с шаговым двигателем
- необходимость в дополнительном элементе — датчике;
- блок управления и логика его работы более сложны (требуется обработка результатов датчиков и выбор управляющего воздействия, а в центре контроллера шагового двигателя находится только счетчик);
- проблема фиксации: обычно она решается постоянным торможением подвижного элемента или вала электродвигателя (что приводит к потерям энергии) или использованием червячных / винтовых передач (конструктивное усложнение) (в шаговом двигателе каждый шаг задается сам мотор).
- сервоприводы обычно дороже, чем шаговые.
Однако возможно использование сервопривода на базе шагового двигателя или в дополнение к нему, в некоторой степени объединив их преимущества и исключив конкуренцию друг с другом (сервопривод выполняет грубое позиционирование в зоне покрытия соответствующая система шагового двигателя, причем последний выполняет окончательное позиционирование с относительно большим крутящим моментом и фиксирует положение).
В сервоприводе нет проблем с ремонтом, в отличие от шагового. Высокоточное позиционирование и поддержание в заданном положении обеспечивается работой электрической машины в клапанном режиме, суть которого сводится к ее работе в качестве источника энергии. В зависимости от несовпадения положения (и других координат электропривода) формируется силовая задача. При этом несомненным плюсом сервопривода является энергоэффективность — ток подается только в том объеме, который необходим для удержания рабочего органа в определенном положении. В отличие от пошагового режима, когда применяется максимальное значение тока, определяющее угловую характеристику станка. Угловая характеристика станка аналогична небольшим отклонениям механической пружины, которая пытается «подтянуть» рабочий орган в нужную точку. В шаговом приводе чем больше смещение положения, тем больше сила при постоянном токе.
Скетч для сервопривода Ардуино
Скетч ниже заставит сервопривод переместиться в позицию 0 градусов, подождать 1 секунду, затем повернуться на 90 градусов, подождать еще одну секунду, после повернуться на 180 градусов и перейти в первоначальное положение.
Также дополнительно мы используем библиотеку servo — скачайте ниже или в нашем разделе Библиотеки.
Содержимое zip-файла размещается в папку arduino-xxxx/hardware/liraries.
Скетч № 1
// Подклоючаем библиотеку Servo
#include <Servo.h>
// Пин для сервопривода
int servoPin = 3;
// Создаем объект
Servo Servo1;
void setup() {
// Нам нужно подключить сервопривод к используемому номеру пина
Servo1.attach(servoPin);
}
void loop(){
// 0 градусов
Servo1.write(0);
delay(1000);
// 90 градусов
Servo1.write(90);
delay(1000);
// 180 градусов
Servo1.write(180);
delay(1000);
}Если сервомотор подключен к другому цифровому контакту, просто измените значение servoPin на значение используемого цифрового вывода.
Помните! Использование библиотеки Servo автоматически отключает функцию PWM для PWM-контактов 9 и 10 на Arduino UNO и аналогичных платах.
Наш код просто объявляет объект и затем инициализирует сервопривод с помощью функции servo.attach(). Мы не должны забывать подключать серво библиотеку. В цикле мы устанавливаем сервопривод на 0 градусов, ждем, а затем устанавливаем его на 90, а затем на 180 градусов.
Скетч № 2
Второй скетч для варианта с Arduino Diecimilia ниже.
Нам достаточно будет скачать и подключить библиотеку из архива:
Сам код такой:
#include <Servo.h>
Servo servo1; Servo servo2;
void setup() {
pinMode(1,OUTPUT);
servo1.attach(14); //analog pin 0
//servo1.setMaximumPulse(2000);
//servo1.setMinimumPulse(700);
servo2.attach(15); //analog pin 1
Serial.begin(19200);
Serial.println("Ready");
}
void loop() {
static int v = 0;
if ( Serial.available()) {
char ch = Serial.read();
switch(ch) {
case '0'...'9':
v = v * 10 + ch - '0';
break;
case 's':
servo1.write(v);
v = 0;
break;
case 'w':
servo2.write(v);
v = 0;
break;
case 'd':
servo2.detach();
break;
case 'a':
servo2.attach(15);
break;
}
}
Servo::refresh();
}Сервопривод – что это такое
Под этим понятием обычно подразумевают оснащенный электромотором механизм, который можно разместить под нужным углом и зафиксировать в одном положении. Но данное определение недостаточно емкое, поэтому его можно и нужно дополнить.
Это также силовой агрегат, управление которым реализовано через отрицательную обратную связь. Именно последняя дает возможность чутко контролировать заданные параметры перемещения. И у него просто должен быть датчик – позиции, нагрузки, скорости – и блок контроля, который поддерживает необходимые условия в автоматическом режиме.


![Сервоприводы: устройство, принцип работы и основные виды [амперка / вики]](https://zakazkolodca.ru/wp-content/uploads/3/6/5/36587bb96fbb1e38ae4bf402db5c93b5.jpeg)




В числе самых распространенных сегодня находятся модели, сохраняющие установленный угол и/или интенсивность выполнения технологической операции.
Установка Arduino IDE
Arduino IDE — это интегрированная среда разработки (IDE), которая позволяет программировать Arduino и другие платы на базе процессоров AVR и ARM.
Для установки Arduino IDE на ваш компьютер выполните следующие шаги:
После установки Arduino IDE вы будете готовы начать программирование и работу с Arduino. При первом запуске Arduino IDE вам может потребоваться выбрать вашу плату Arduino и порт, к которому она подключена.
Примечание: Если у вас возникли проблемы при установке или использовании Arduino IDE, вы можете найти много полезной информации и решений в официальной документации Arduino и на форумах сообщества Arduino.
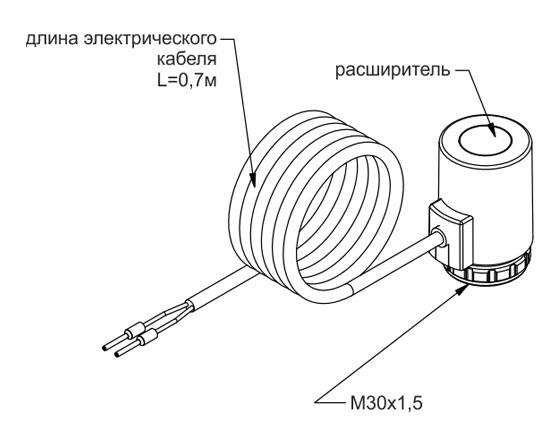
Термоэлектрические сервоприводы

Принцип действия:
Термоэлектрический сервопривод регулирует температуру воздуха в комнате с помощью комнатного термостата. Сервопривод открывает или закрывает клапан в зависимости от установленной температуры комнатного термостата. Информация о рабочем режиме передается электрическим импульсом от комнатного термостата до сервопривод через кабельное соединение. Термоэлектрический сервопривод работает беззвучно.
Применение:
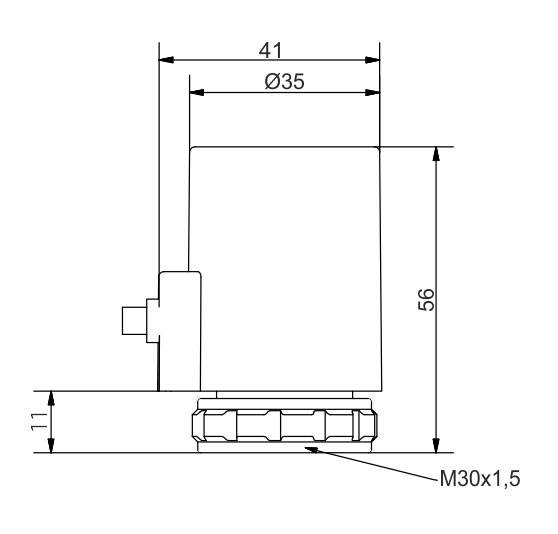
Термоэлектрический сервопривод является частью системы управления отопления и предназначается для работы с термостатическими клапанами резьбой M30x1,5. Особенно подходит для регулировки температуры в выделенной зоне, а также для регулировки температуры пола. Устройством можно управлять при помощи комнатного термостата, используя измерения комнатной температуры. Регулирование обогрева осуществляется с помощью воскового датчика, обеспечивающего работу двойного действия. Через прозрачное стекло можно увидеть втулку. Верхнее положение втулки указывает на открытом положении термостатического клапана.
Монтаж
- Необходимо открутить защитный колпачок с термостатического клапана
- Не используйте гаечный ключ или подобные инструменты
- Установить сервопривод на термостатический клапан; одной рукой, нажмите на сервопривод сверху , чтобы закрыть клапан. Другой рукой, затяните гайку вручную.
- Соединительный кабель не может быть в непосредственном контакте с объектами высокой температуры: трубами, радиаторами, и т.д.
- Электрическое подключение выполнить в соответствии с инструкцией
- Для регулирования гидравлической системы все отопительные контуры должны быть открыты
- В случае демонтажа, в первую очередь необходимо отключить термоэлектрический сервопривод от электропитания
Технические данные
| Номер артикула | 603200055 | 603200054 |
| Напряжение | 24V DC (+-0,1V) | 230V AC (+-3V) |
| Время открытия / закрытия при 25 ° C | ок.3 мин | ок.3 мин |
| Постоянный ток | 75mA | 7,5mA |
| Ток переключения | 400mA | 300mA |
| Макс. температура воды в клапане | 80°C | 80°C |
| Макс. температура окружающей среды | <55°C | <55°C |
| Температура хранения | <45°C | <45°C |
| Длина кабеля | 0,7m | 0,7m |
Внимание
- При отсутствии напряжения, восковой датчик не нагревается. Таким образом, сервопривод закрывается.
- Подключение электричества должно выполняться квалифицированным специалистом в соответствии с разрешениями и нормами.
- Запрещено разбирать сервопривод, так как это может вызвать необратимое повреждение
- В случае повреждения сервопривода, следует немедленно отключить его от электричества.
- Не стоит самостоятельно менять соединительный кабель. Ремонт может быть осуществлен только производителем.
- Сервопривод необходимо чистить слегка влажной тряпкой. Не стоит употреблять химические средства для его очистки.
- Гарантийный срок составляет 24 месяца с даты покупки.

Заключение
Автоматическое управление бытовыми и производственными системами прочно вошло в нашу жизнь. В последнее время стал широко применяться привод под управлением программируемых блоков различного назначения типа ардуино.
Это позволило создать принципиально новые любительские летающие радиоуправляемые устройства, роботы, детские игрушки. В промышленности сервопривод применяют в станках, на экскаваторе, на квадроцикле и т.д. Сегодня невозможно представить нашу жизнь без сервоприводов.
На видео представлена работа аналоговых сервоприводов sg90 в модели робота-паука: